











นักวิจัยจากมหาวิทยาลัยปักกิ่ง Peking University นำโดย ศาสตราจารย์ Wang Qining พัฒนาชุดหุ่นยนต์ (Exoskeleton) ใต้น้ำ (Underwater Exoskeleton) ช่วยการเคลื่อนไหวข้อเข่าของนักดำน้ำ ลดความเหนื่อยล้าและการใช้ลมหายใจ ทำให้สามารถดำน้ำได้ยาวนานและปลอดภัยมากขึ้น
การทำงานของชุดหุ่นยนต์ (Exoskeleton) ใต้น้ำ
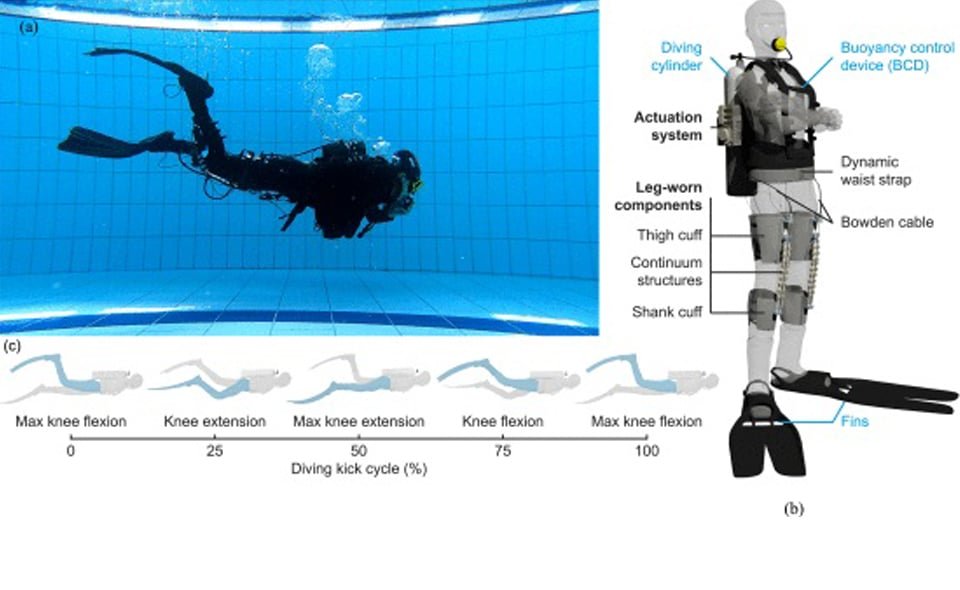
ชุดหุ่นยนต์ Exoskeleton ใต้น้ำ จะมีลักษณะแตกต่างจากหุ่นยนต์ Exoskeleton แบบทั่วไปที่มีลักษณะเป็นชุดหุ่นยนต์แข็ง ๆ เพราะตัวชุดนี้ มีลักษณะเป็นชุดสายรัดและที่มีโครงรองข้อเข่า มีน้ำหนักเบา และยืดหยุ่นสูง เป็นชุดที่ต้องติดตั้งทั้งตัวต่อเสริมร่วมกับชุดประดาน้ำ น้ำหนักส่วนใหญ่จะอยู่ที่ด้านหลัง เพื่อไม่ให้รบกวนการลอยตัวและการทรงตัวใต้น้ำ
ภายในมาพร้อมกับเซ็นเซอร์การเคลื่อนไหวติดตามจังหวะการเตะขาของนักดำน้ำและปรับแรงช่วยแบบเรียลไทม์ มีมอเตอร์และแบตเตอรี่ ติดตั้งไว้อยู่บริเวณอยู่ด้านหลังและบริเวณเข็มขัด ด้านการสวมใส่จะใช้สายรัดและแผ่นรองผสมกัน ทำให้สวมใส่แน่นกระชับ แต่ยังเคลื่อนไหวได้เป็นธรรมชาติ
ชุดหุ่นยนต์ดังกล่าว ออกแบบให้เป็นระบบ Bilateral cable-driven หรือการส่งแรงไปยังร่างกายผู้ใช้ผ่านสายเคเบิลแบบสองด้าน ที่จะช่วยเสริมแรงนักดำน้ำขณะเตะขาแบบ Flutter kick หรือการเตะขาสลับขึ้นลงอย่างรวดเร็วและต่อเนื่อง ช่วยเพิ่มแรงบิดเข่าได้เคลื่อนไหวได้ง่ายขึ้น มาพร้อมเซ็นเซอร์วัดการเคลื่อนไหวและควบคุมแรง ทำให้การเคลื่อนไหวของนักดำน้ำเป็นธรรมชาติ
การทดสอบ
ในการทดสอบกับนักดำน้ำ 6 คน พบว่า ตัวชุดช่วยลดการใช้ลมหายใจลง 22.7% ลดการทำงานของกล้ามเนื้อขา (Quadriceps) ลง 20.9% และส่วนกล้ามเนื้อน่อง (Calf) ลง 20.6% ช่วยให้นักดำน้ำปรับตัวได้ดีและเคลื่อนไหวเป็นธรรมชาติ
จากการทดสอบแสดงให้เห็นว่า ชุดหุ่นยนต์ Exoskeleton ใต้น้ำ ช่วยให้นักดำน้ำประหยัดพลังงาน ลดความเหนื่อย และยืดระยะเวลาในการดำน้ำเพิ่มขึ้น
นักวิจัยมองว่าตัวชุดช่วยเปิดทางด้านการศึกษา “ชีวกลศาสตร์การเคลื่อนใต้น้ำ (underwater biomechanics)” และเทคนิคการฝึกนักดำน้ำได้ เพราะมันเป็น “เครื่องมือ” ที่ช่วยวัดหรือประเมินการเคลื่อนขณะดำน้ำได้
อย่างไรก็ตาม ทีมวิจัยมองว่าชุดหุ่นยนต์ Exoskeleton ใต้น้ำนี้ ยังได้รับการทดสอบที่น้อยเกินไป โดยขาดการทดสอบที่สำคัญต่าง ๆ ดังนี้
ทดสอบกับนักดำน้ำ 6 คนที่มีประสบการณ์เท่านั้น ผลลัพธ์อาจยังไม่ครอบคลุมกลุ่มนักดำน้ำทั่วไป (มือใหม่,นักดำน้ำลึก ฯลฯ)
ยังไม่มีการทดสอบการใช้งานจริงใต้น้ำนาน ๆ หรือในสภาวะแรงดัน น้ำลึก ซึ่งจะมีความท้าทายเรื่องการซีล ป้องกันน้ำ การบำรุงรักษาเข้ามา
ไม่มีระบุถึงแหล่งพลังงานและการชาร์ต รวมไปถึงการเปลี่ยนแบตใต้น้ำ
งานวิจัยนี้ได้รับการตีพิมพ์ใน IEEE Transactions on Robotics : https://ieeexplore.ieee.org/document/11202658



